Hallee,
de afgelopen maanden ben ik voor de Gadgetman Mark Baars bezig geweest om zijn Blaupunkt Bluebot Xboost robot stofzuiger te verbouwen. In deze post lees je niet alleen waarom, maar laat ik ook zien hoe je zoiets kunt doen. Dat heet, ik bespreek een aantal aspecten van de ombouw. Tevens laat ik via een paar foto’s zien hoe dat eruit ziet.
De aanleiding
De robot stofzuiger was, bij de Gadgetman thuis, zo handig om een grote spiegel omver te rijden. De spiegel valt bovenop de robot. Met als gevolg dat spiegel en de glazen bovenkant van de stofzuiger in duizend stukjes in en op de machine terecht is gekomen.

Gelukkig bleek, na grondig schoonmaken, dat de machine technisch nog helemaal in orde was. Dus enkel cosmetische schade. Dit is uiteraard een ideale kans om de machine cosmetisch beter te laten aansluiten bij de belevingswereld van de echte Nerd. Allerlei alternatieven zijn de revue gepasseerd tijdens de brainstorm met Mark.
Wat dacht je van het plaatsen van een actioncam in of op de robot zodat hij kan filmen tijdens het zuigen. Dit is idee is afgeschoten omdat daardoor de machine zo hoog wordt dat hij nergens meer onderdoor kan. Of… dat de camera met periscoop spiegels in de machine geplaatst moet worden. En daar is geen ruimte voor.
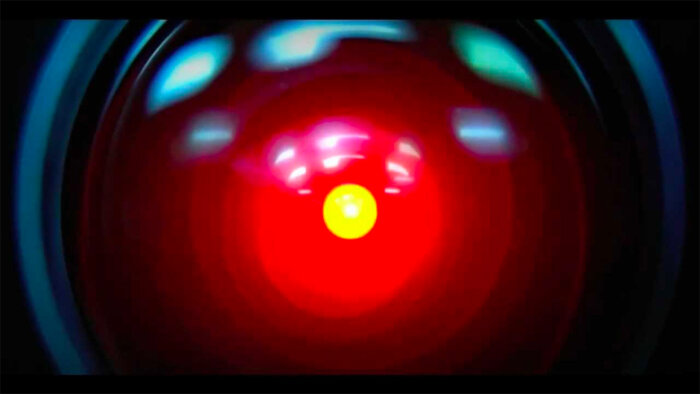
Ook de iconische ontwerpen die de Nerd van boven de 40 leuk vindt zijn langs gekomen, zoals de Cylons uit Battlestar Galactica, The Knight Rider KITT robot en natuurlijk de HAL9000 uit 2001: A Space Odyssey.
Aangezien de Xbot een grote ronde knop op de bovenkant heeft zitten sprak ons het idee van een HAL9000 enorm aan. Wat als die knop vervangen kan worden door het rode oog van de Hal9000? Dat zou cool zijn.
Na wat passen en meten, en wat schetsen bleek dat een HAL9000 replica in de kap haalbaar zou zijn. Het originele oog van HAL is een 8mm Nikon fisheye lens met een diameter van 82mm. Dat past niet op de stofzuiger. Maar een oog met een diameter van 60mm zou wel gaan passen. Dus dat is de basis van het ontwerp geworden.
Het eindresultaat
Het uiteindelijke design is te zien in onderstaand Youtube filmpje:
De uitgangspunten voor de ombouw
Belangrijk om te weten is dat we ervoor gekozen hebben dat de robot stofzuiger volledig functioneel zou blijven. Dit betekent dat de machine via een hoofdschakelaar geactiveerd moet kunnen worden. Deze schakelaar maakt het bijvoorbeeld mogelijk om de machine met WIFI te koppelen. De indicator ledjes (3 stuks) kunnen verschillende kleuren laten zien, zoals groen, rood en geel. Deze ledjes moeten op de een of andere manier terug komen in het ontwerp. Dit hoeft natuurlijk niet precies op dezelfde plek, maar wel met dezelfde functie.
Het oog
Het meest kenmerkende deel van de HAL9000 is natuurlijk het rode oog. Door het ontwerp van HAL komt het rode oog min of meer op dezelfde plek te zitten als de oorspronkelijke ronde schakelaar van de robot. Hoe handig zou het zijn als dit oog ook meteen de hoofdschakelaar zou kunnen zijn.
In China verkopen ze 60mm arcade schakelaars die perfect zijn voor dit doel. Immers, 60mm koepelvorm als benadering van de oorspronkelijke lens, en meteen een schakelaar! Wat zilver en zwarte spuitverf en het oog komt aardig in de buurt. En het goede nieuws…. deze schakerlaars kosten maar een paar euro.

Nu heb je twee opties om de robot zuiger te bedienen met deze schakelaar. De elektronische optie is om de meegeleverde microswitch te gebruiken en deze op het moederbord vast te solderen. Het nadeel van van deze route is dat de microswitch onderin de schakelaar gemonteerd moet worden, en daar is eigenlijk geen plek voor. Daarnaast moet je de nieuwe kabels op het moederbord solderen. Dat is, met het nodige geduld, op zich wel te doen. Maar als je het kunt vermijden is daar ook wat voor te zeggen.
De mechanische optie werkt hetzelfde als de originele schakelaar. Een stuk plastic wordt door de mens ingeduwd en die duwt op zijn beurt op een microswitch op het moederbord. Met een 3D printer print je een ‘adapter’ die de afstand tussen de nieuwe schakelaar en de microswitch op het moederbord kan overbruggen. Als nu de rode knop naar beneden geduwd wordt gaat deze adapter mee. Deze raakt de schakelaar op het moederbord. En alles werkt net zo robuust zoals het altijd gewerkt heeft.

Het licht
Nu zou je denken dat het handig is dat de schakelaar geleverd wordt met een ledje. Dit lichtje kan vastgezet worden in de schakelaar. In dit geval is het niet bruikbaar. Het ledje is bedoeld om de hele schakelaar te voorzien van een egale rode gloed. In de eerste foto is te zien dat het HALL oog een hotspot in het midden heeft, met een kleine gloed, en daarna richting de randen van de lamp steeds donkerder wordt. De schakelaar heeft een rode kap en intern een witte diffuser. Dat kun je niet aanpassen zonder de hele schakelaar te slopen. Om het effect te bereiken kun je nu alleen het ledlicht verder van de schakelaar afzetten, Het gevolg hiervan is dat de lichtbundel op de diffuser kleiner wordt.
Nadeel van het licht verder weg zetten, is dat er meer licht nodig om nog wat helderheid over te houden (fotografen kennen dit verschijnsel als de ‘inverse-kwadraat-regel’).
Mijn oplossing. Zaag de kop van een aluminium zaklampje (zeg Action zaklamp van een euro of 2.) Soldeer een plus en min draad aan de lamp. En kieper het geheel vol hotglue om de aansluitingen wat robuuster te maken.

Ontwerp en 3D-print een buisje die de diameter van de zaklamp overbrugt naar de diameter van de schakelaar.
Het zaklampje zit op de bodem van de robot, de licht-tunnel erover heen. En als de kap van de machine teruggeplaatst wordt dan valt de schakelaar precies in de adapter, zodat een gesloten licht-tunnel ontstaat.

Technisch gezien is het mogelijk om stroom af te tappen van de 14V lithiumcellen in de robotzuiger. We hebben er echter voor gekozen om de batterijlading te gebruiken om het echte werk te doen, namelijk schoonmaken. We hebben ervoor gekozen om het oog te laten werken op 3 AAA batterijen. Daarvoor is een batterij houder ontworpen en ge-3D-print. In de video is te zien dat deze rechts onder de kap gemonteerd is, zodat je er makkelijk bij kunt.
Natuurlijk kun je er in een volgende versie nog voor kiezen om een stukje electronica toe te voegen om de lampen mee te laten draaien op de lithiumbatterijen, maar ik heb het voorgevoel dat af en toe de oplaadbare batterijen wisselen geen issue is. Mijn verwachting is dat de robot een week of twee vooruit kan op 3 AAA oplaadbare batterijen.
De grill en de led indicatoren
De keuze van het 60mm HAL oog laat toe dat de grill van de voicebox van HAL zo gepositioneerd kan worden dat van de bovenste en onderste led de helft te zien is, en van de middelste de gehele led.
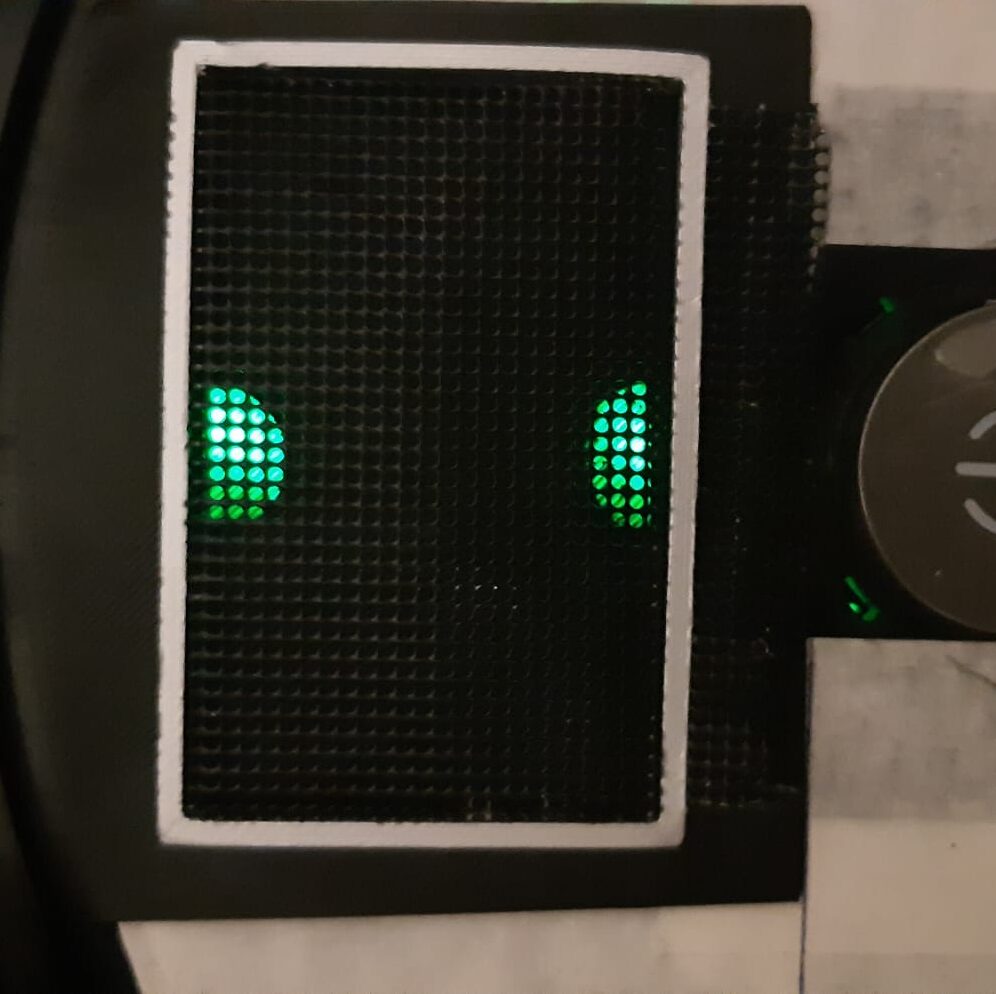
De grill is een deel van een oude computer luidspreker. Die lelijke dingen die vroeger naast je monitor stonden 😉 Gewoon een stuk uitzagen met de dremel en in model hameren of duwen. Het diffuus effect van de ledjes kun je krijgen door een stukje PLA te printen waarbij de cirkel in het midden, en de twee halve cirkels 0.2 mm dik zijn, en de rest van het plaatje 1mm dik. 0.2mm PLA laat licht door. Op deze manier is de machine bedekt, en krijg je door de PLA in combinatie met de grill een fraai led effect. Voor weinig 😉
HAL9000 voice
Bestuderen van het moederbord van de blaupunkt geef al snel het geheim prijs welke audio chip gebruikt is. Ik heb echter het ernstige vermoeden dat de sound files in het flashrom staan van de microcontroller. Deze heeft namelijk 4MB rom geheugen. Ideale plek om de bestanden neer te zetten. Nadeel is dat ik geen idee heb hoe ik de bestanden kan vervangen zonder de microcontroller nieuwe firmware te moeten geven.
Als iemand een methode weet om de bestaande firmware uit de machine te kunnen halen en deze gemodificeerd weer terug te zetten dan hoor ik graag. Dan nemen we dat in de volgende versie van de machine mee.
Voor deze minimal viable product (MVP) hebben we onderzocht hoe we geluid zouden kunnen toevoegen, via een aparte audiochip.
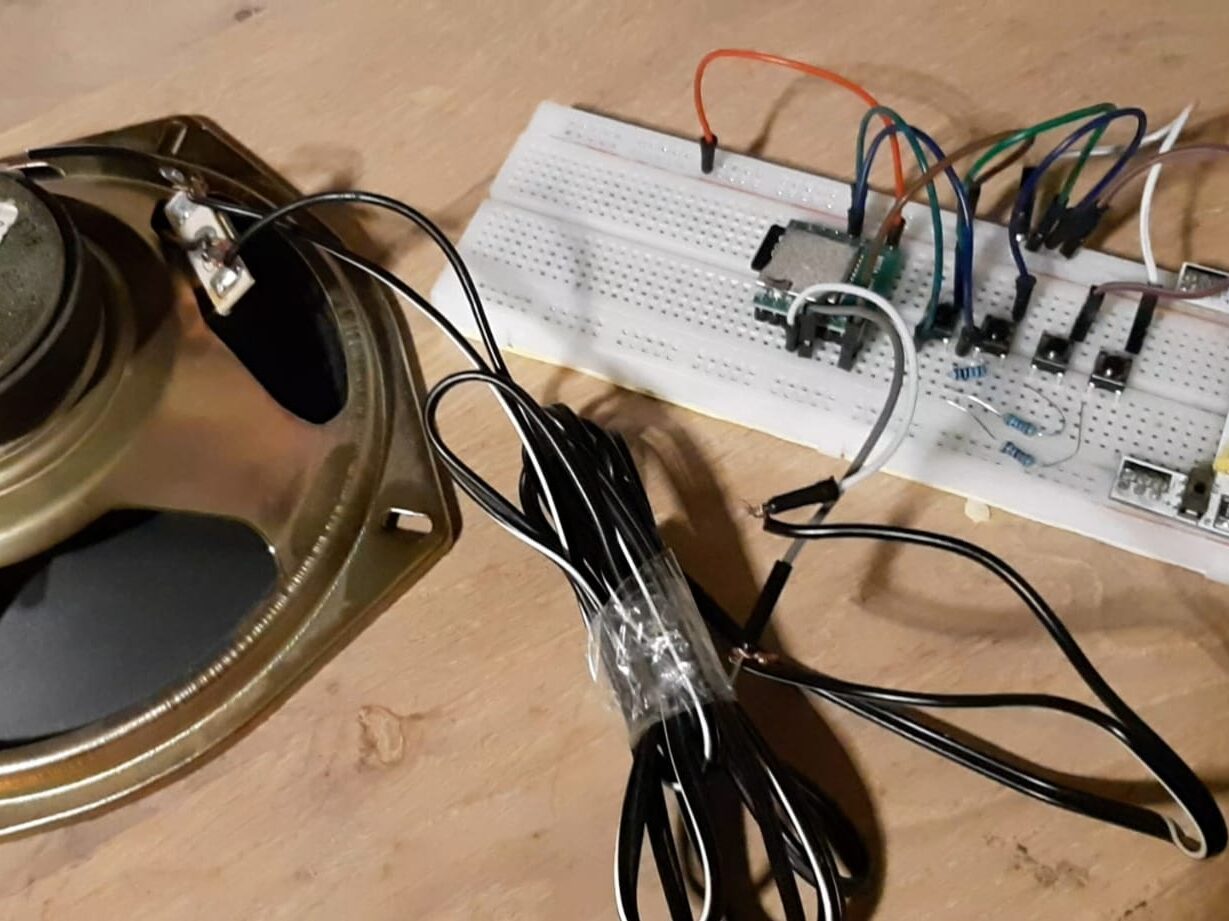
Het is absoluut mogelijk om geluidseffecten toe te voegen op bepaalde ‘events’. Denk aan het gaan branden van indicator leds of het starten van de motoren. Maar dit is natuurlijk een hack ten opzichte van het starten van soundfiles vanuit de microcontroller. Om de audio chip goed te laten werken moet er een extra microcontroller bij, zoals een arduino, of wemos D1 mini. Op zich allemaal best te doen. We hebben uiteindelijk besloten om de HAL voice achterwege te laten. De belangrijkste reden daarvoor is dat er naast de schakelaar en de batterijen voor de lamp domweg geen plek meer is in de machine om nog een extra circuit kwijt te kunnen met extra stroom voorziening.
Besturing op het licht
In de video is te zien dat het oog van HALL gaat branden als de machine start en weer netjes uitgaat als de machine klaar is. Technisch gezien wordt de rechter borstel motor gebruikt als aan/uit schakelaar van de ledverlichting. Op de motor is een optocoupler gesoldeerd die als schakelaar fungeert. Als de motor aanspringt geeft deze genoeg stroom door om de led in de optocoupler te laten branden, dus de optocoupler laat aan de andere kant van de chip stroom lopen tussen de collector en de emitter. Dus gaat het licht branden. Als de borstelmotor stop, dooft ook het licht uit. En zo zorgen we ervoor dat de batterijen niet leeglopen als de machine niet in gebruik is.
Doe het met vlag en wimpel, maar hou het simpel !